This is going to be complex...
So I drew the basic idea out in Tinkercad. SERIOUSLY pushed the limits of Tinkercad, and that was drawing it at 50% scale.
Next plan is to draw it correctly in Fusion360.
There are a lot of parts to this build, and everything is offset by 120 degrees.
Lots of 3d printing on this build. Get ready Prusa, you are gonna be busy.
Next plan is to draw it correctly in Fusion360.
There are a lot of parts to this build, and everything is offset by 120 degrees.
Lots of 3d printing on this build. Get ready Prusa, you are gonna be busy.
Timer module.
|
One of the first items I spotted was the weird mechanical timer in the main control box.
This looks like a hours meter from an electrical box or something, but extensive searching didn't throw up any viable sources. Also, this counts down, which is unusual. I suspect its a cheat, as in some shots in the film, you can see the numbers are not quite correct. To match the movie, it needs to count down from 15 minutes. |

|
|
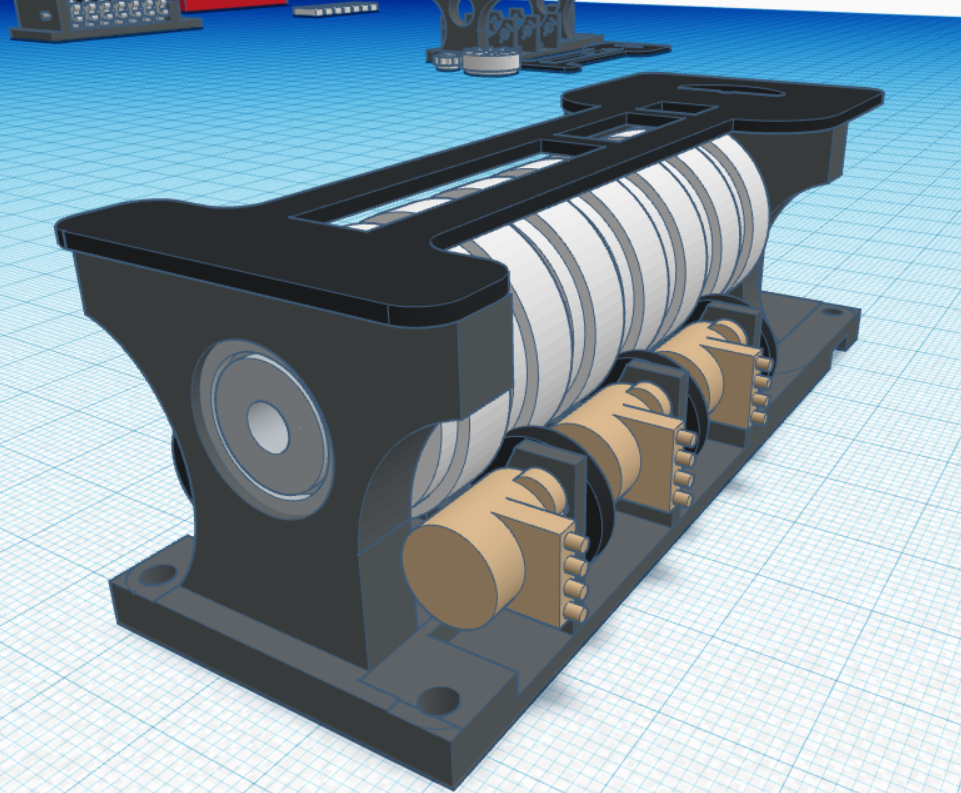
So I sketched up a small mechanical timer to the correct scale.
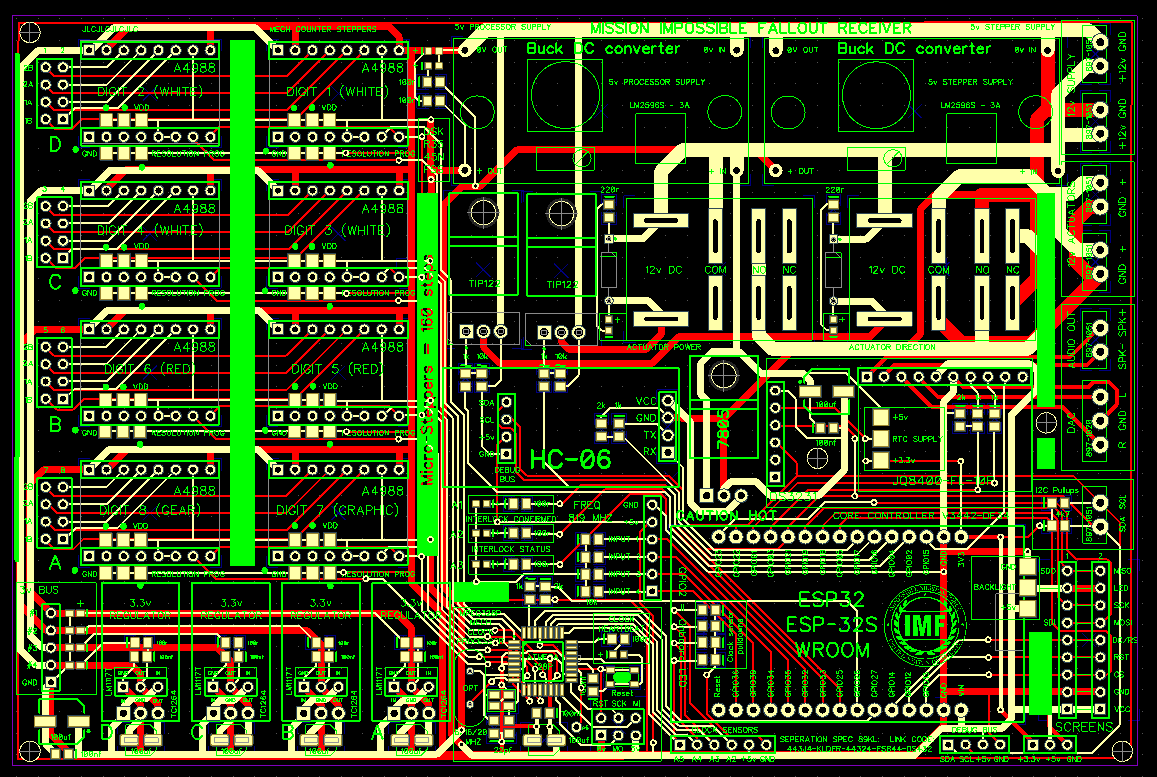
I planned to use some tiny stepper motors to drive the wheels. These are usually used in camera shutters. I managed to get 10x steppers for £2.50. Guess where they came from. The wheels will be bearing mounted, and driven with a 3d printed rubber wheel. Each wheel has a tiny magnet in the circumference and there is a hall sensor in the base so that I can accurately keep track of position. After an evening of tinkering, I worked out a drive system and designed a main weapon PCB that will fit in the control box. This has all the stepper drivers, plus the SFX board, ESP32, relays for the linear actuators (opening the centre core), and other required features. |