Radio Controlled submarine. The 2020 rebuild

|
Revell 1/72 scale GATO class submarine
I purchased a static Revell submarine model in a fit of 'lets buy something' when I lived on the Isle of Man several years ago.
I then decided not to just build it, but to make it actually work. This can be done in several ways. You either simply give it adjustable bow planes (tiltable) and then drive the submarine forward. Tilt the planes down, and you drive it underwater. However, stop the motors... and she surfaces again. I wanted to make it work the same way a real submarine works. |

|
|
So, a Googling I went.
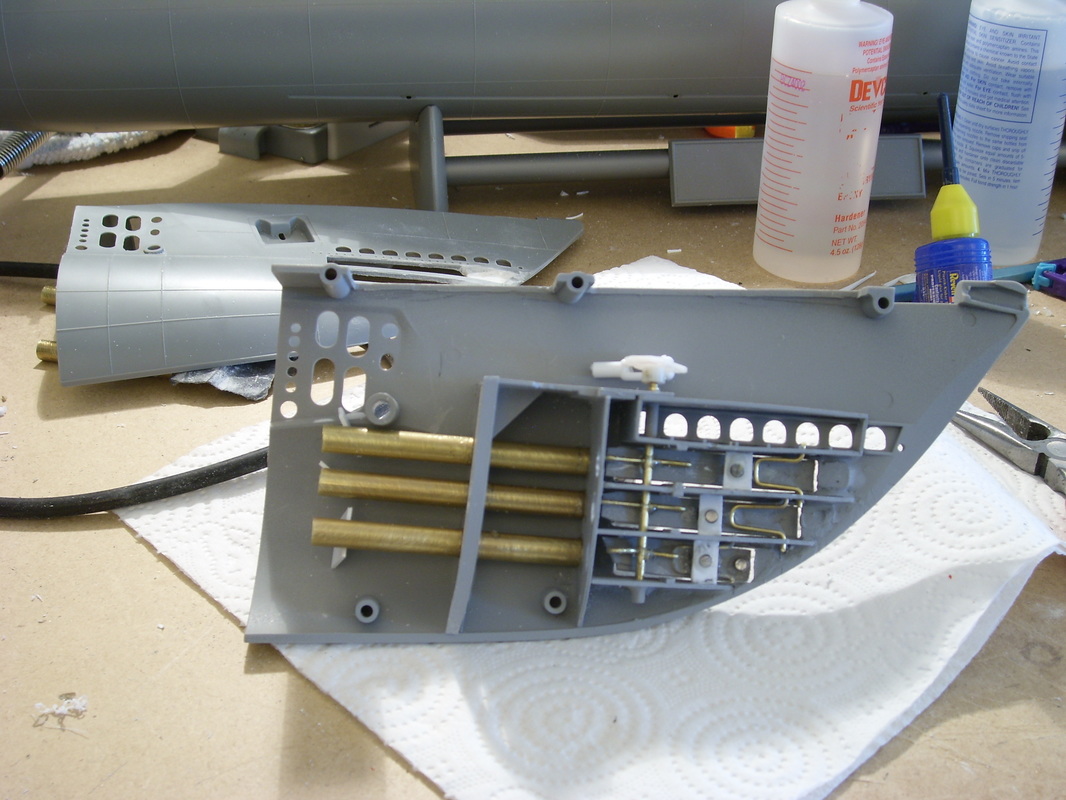
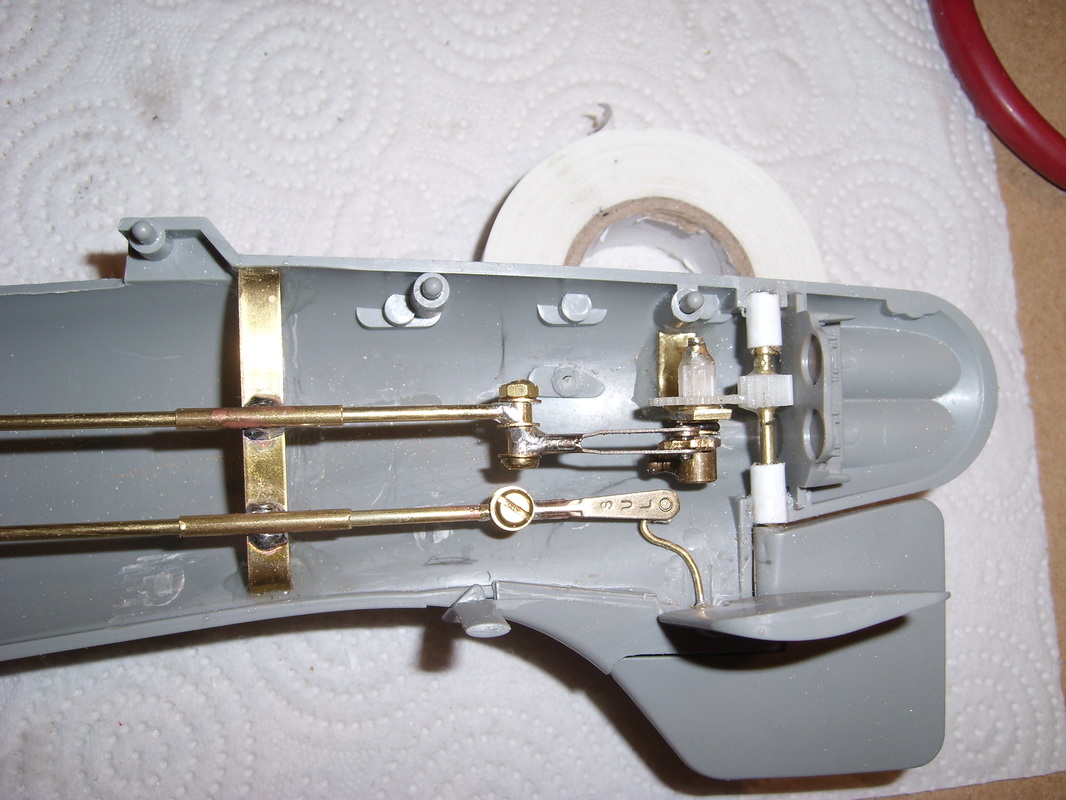
First of all, the kits bow doors were wrong. I cut them out and re-designed them to actually open and close. At a later date, I may add working torpedoes. I did manage to make a 10mm diameter demo torpedo using some plastic tubing, a very small prop, the tail motor out of those tiny radio controlled helicopters and a watch battery. Worked surprisingly well. I cut the correct shaped bow torpedo doors (used old WW2 reference images) and then inserted brass tubes. These door open and close using a servo, a cam system and Neodymium magnets to snap them closed. I designed a system to servo operate the front bow planes (including stowing them vertically), the rear planes and the rudder. Its getting complicated again...
The top was cut off the submarine body and some structural re-enforcing done.
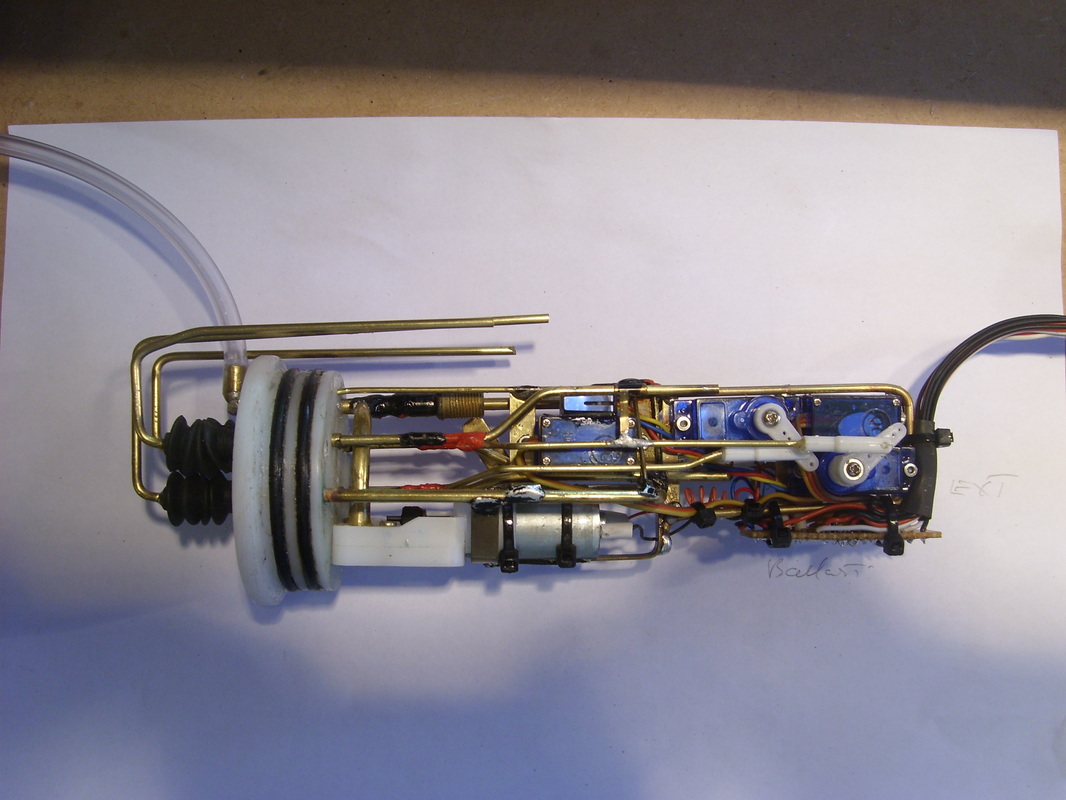
I then made a 4 compartment watertight tube using polycarbonate pipe off good old Ebay. I turned some end caps out of a lump of Delron and added dual rubber gasket rings. Then I started making each of the compartments. The front compartment was the pump room It houses a small 6v air pump (taken from a blood pressure machine) and a selection of servos and valves. This controlled the inflating an deflating of the central ballast tank. It also houses the servos for the front planes and the torpedo tubes. Next compartment along is the ballast tank.
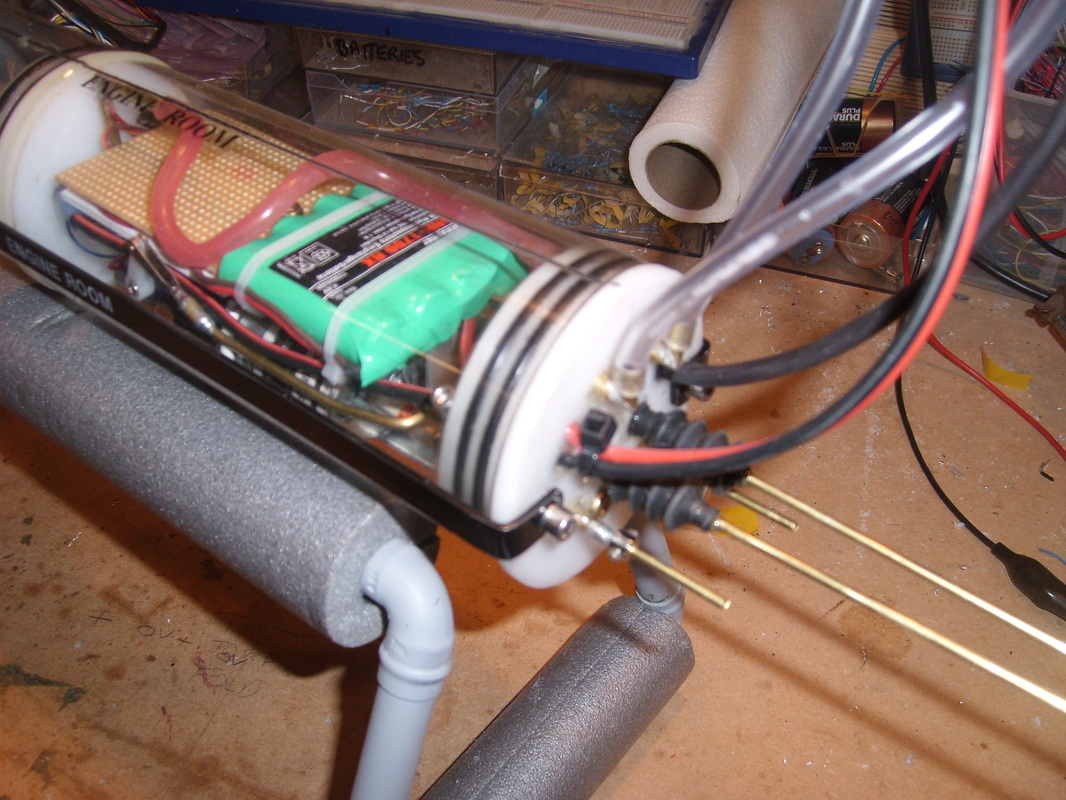
Simply an empty tube with holes drilled into it so that it will fill with water. Inside is a rubber bag that inflates or deflates using the pump in the radio room. Last compartment is the engine room. This contains the 4.8v battery pack for the servo system, the twin motors for the props and servos for the rudder and rear planes. The props are connected to the motors using universal joints and custom brass, grease filled tubes. There is also room for further electronic equipment. The project is ongoing, and I am not exactly sure how I will end up controlling the entire system. Each time to sit down with it, I come up with new solutions to problems. I will have a safety system where it blows the tanks, and releases a buoy, should there be a loss of radio signal for more than 2 minutes.
The radio system I am using is an old style Robbe F14. The reason is because its the old analogue system and the signal goes through the water. Modern digital systems cannot. Also, the F14 controller has an expansion module fitted, so I have plenty of channels to use for extra equipment. I am thinking of adding a depth controller module (I will probably make it from scratch).
That will be a pressure sensor that will alter the rear planes automatically to keep the sub at the level you choose. This system will also incorporate a pitch controller. The sole job of that is to keep the sub level. I will be able to dive the sub or blow the tanks using the air pump. 
The servo rods leave the watertight cylinder in brass pipes, sealed with rubber concertina type shrouds.
The next section is the radio room. This houses the radio control receiver and the main 7.2v battery pack for the twin motors. At a later date, it will also house the Arduino that controls the leveling and control systems. |


|

Other additions?
Full sound effects of course!
As I mentioned earlier, I may add working torpedoes.
When I assembled all the deck guns, I fitted leds in the barrels.
I plan to rotate these guns using servos with magnets on the base of the turrets.
This way, the servo can be inside the waterproof tube, but they turn the guns
using magnetism.
No issues with having to waterproof the turret bearing then.
I also have been playing with some ultrasonics. If I can find some small enough
transducers, then I may try and add basic sonar.
I will obviously fit it out with full running lights. I have been researching these lights on an American website where they have restored one of these subs.
There is a lot of work in this project, and its just tinkered with now and then.
You can spend a fortune on the parts for these subs (a decent off-the-shelf dive controller module is around £200).
That is why I plan to make my own. Plus, its far more rewarding.
Full sound effects of course!
As I mentioned earlier, I may add working torpedoes.
When I assembled all the deck guns, I fitted leds in the barrels.
I plan to rotate these guns using servos with magnets on the base of the turrets.
This way, the servo can be inside the waterproof tube, but they turn the guns
using magnetism.
No issues with having to waterproof the turret bearing then.
I also have been playing with some ultrasonics. If I can find some small enough
transducers, then I may try and add basic sonar.
I will obviously fit it out with full running lights. I have been researching these lights on an American website where they have restored one of these subs.
There is a lot of work in this project, and its just tinkered with now and then.
You can spend a fortune on the parts for these subs (a decent off-the-shelf dive controller module is around £200).
That is why I plan to make my own. Plus, its far more rewarding.