Another project that I have decided to start again
|
So it's 2020, and I dug the submarine out of the loft. Sorry state it looked too.
Must be 7+ years since this got abandoned. So, lets pick up where I left off. Hang on. I have a 3d printer now. Lets rip it apart and start again. So first job was to sit for an hour an work out how the hell I intended it top work. Then, I stripped out all the parts and binned the heavy brass support framework. |
|
All this brass can now be replaced with lightweight 3d prints. Who knows, that might work against me when I come to trimming the ballast on this thing. But my logic is that it will be easier to add weight, than lose it.
The water tight compartment end caps (WTC), were made of Delrin. Very badly turned on a DIY lathe, made using a drill and a workmate.
So they can now be 3d printed in PETG. I am not even going to bother with grooves for rubber seals. I will try sealing the tubes using clear silicon.
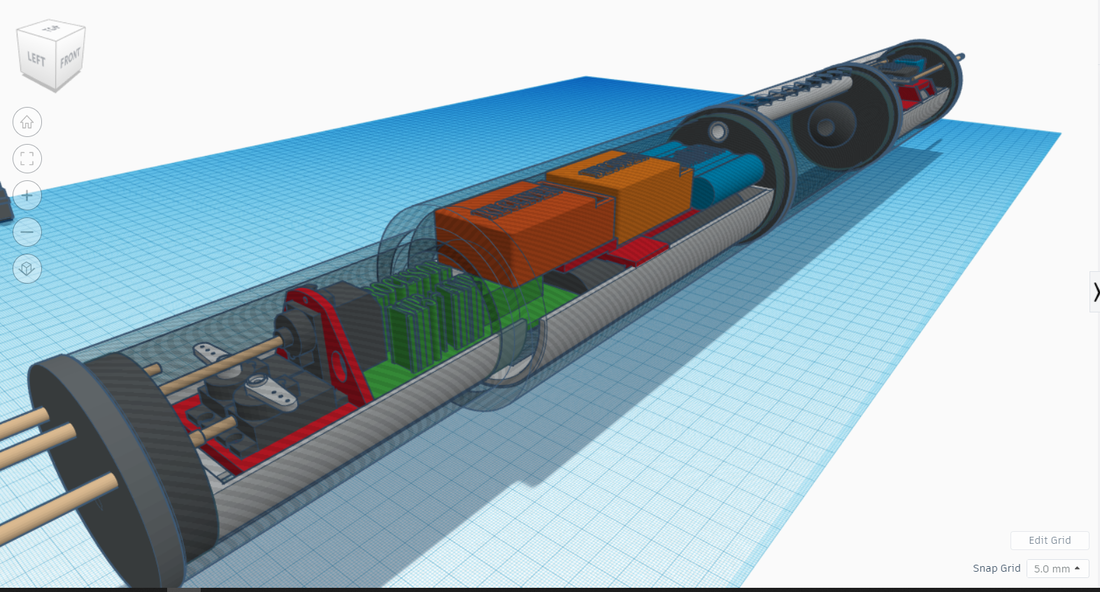
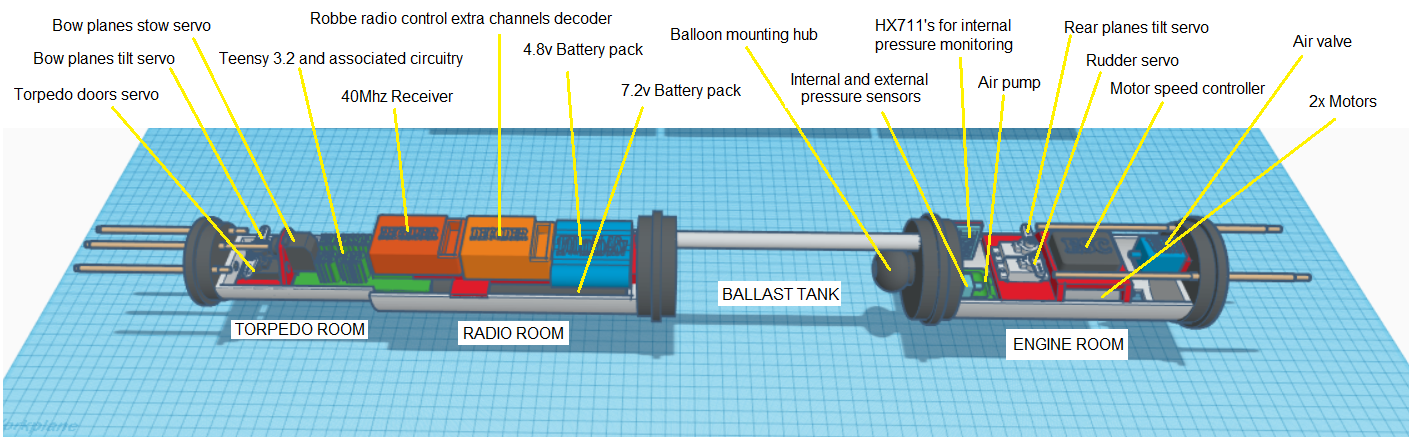
So, I battered Tinkercad for a few hours, and this is the new layout. Probably will change, but got to start somewhere.
The water tight compartment end caps (WTC), were made of Delrin. Very badly turned on a DIY lathe, made using a drill and a workmate.
So they can now be 3d printed in PETG. I am not even going to bother with grooves for rubber seals. I will try sealing the tubes using clear silicon.
So, I battered Tinkercad for a few hours, and this is the new layout. Probably will change, but got to start somewhere.
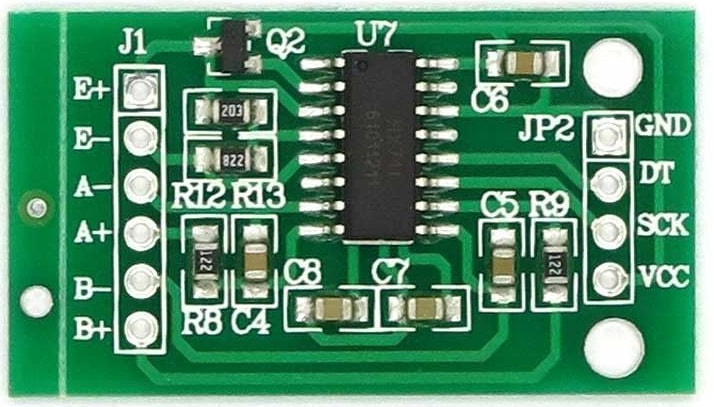
HX711 Load cell amplifier
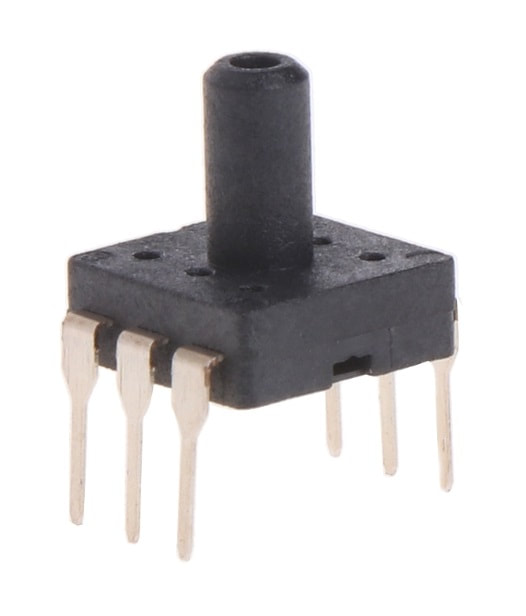
MPS 20N0040D-D pressure sensor
|
Going to use a latex balloon to displace the water in the centre ballast tank.
I have been playing around with MPS 20N0040D-D pressure sensors and HX711 load cell amplifier boards. These seem to work well, and I will use them to monitor the pressure of the balloon, and the internal pressure of the WTC. I am slightly concerned that if the sensor fails, then the balloon will continue to inflate. I need some kind of emergency backup there. This could either be maybe an optical sensor at the very far end of the tube (block the light with the balloon, and the pump stops), or a simple mechanical solution consisting of a small pin mounted in the very top corner of the ballast tank. If the balloon inflates too much and starts to push into the very corners of the ballast tank, it pops. |
Electronics
Teensy is the way forward here. Probably a Teensy 3.2 mounted at the rear of the sub.
This will have the following jobs:
1. Monitoring the pressure of the ballast tank balloon
2. Monitoring the internal pressure of the water tight compartment
3. Monitoring the external pressure sensor to determine depth
4. Monitoring the input from a Gyro to determine pitch, roll etc
5. Controlling the air pump
6. Controlling the air release valve
7. Control of the MP3 module for the sound effects
8. Taking the throttle servo signal input, and converting it for sound effect RPM data
9. Taking the rear planes servo signal and overlaying an adjusted signal created by the APC (Automatic pitch controller)
10. Control of the front planes servo for use with the ADC (Automatic depth controller)
11. Transmission of systems data using a wireless module (when surfaced)
12. Systems monitoring, such as voltages etc
13. Water sensors from each of the waterproof compartments.
14. Triggering of the SLB (Signal Loss Buoy)
15. If the ridiculous amount above actually works, then maybe even a working Sonar module for range finding.
I am sure there will be other processing tasks, but this is my starting list.
This will have the following jobs:
1. Monitoring the pressure of the ballast tank balloon
2. Monitoring the internal pressure of the water tight compartment
3. Monitoring the external pressure sensor to determine depth
4. Monitoring the input from a Gyro to determine pitch, roll etc
5. Controlling the air pump
6. Controlling the air release valve
7. Control of the MP3 module for the sound effects
8. Taking the throttle servo signal input, and converting it for sound effect RPM data
9. Taking the rear planes servo signal and overlaying an adjusted signal created by the APC (Automatic pitch controller)
10. Control of the front planes servo for use with the ADC (Automatic depth controller)
11. Transmission of systems data using a wireless module (when surfaced)
12. Systems monitoring, such as voltages etc
13. Water sensors from each of the waterproof compartments.
14. Triggering of the SLB (Signal Loss Buoy)
15. If the ridiculous amount above actually works, then maybe even a working Sonar module for range finding.
I am sure there will be other processing tasks, but this is my starting list.
Other changes I may make are regarding the deck guns. Originally, I seem to remember I planned to run these from the WTC.
But, I think a better idea will be to make some waterproof gearbox modules that I can mount directly underneath the deck.
These will connect to the WTC with a waterproof connector, and then I can maybe spin the deck guns using Neodymium magnets.
The only issue I can foresee here is that I put LEDS in the barrels of the guns when I assembled them. They will need power.
The conning tower I think will become it's own watertight enclosure. Again containing the motors to spin the dual AA guns and maybe a waterproof speaker.
Making the periscope raise will certainly be a challenge. Not sure how that is going to occur yet!
But, I think a better idea will be to make some waterproof gearbox modules that I can mount directly underneath the deck.
These will connect to the WTC with a waterproof connector, and then I can maybe spin the deck guns using Neodymium magnets.
The only issue I can foresee here is that I put LEDS in the barrels of the guns when I assembled them. They will need power.
The conning tower I think will become it's own watertight enclosure. Again containing the motors to spin the dual AA guns and maybe a waterproof speaker.
Making the periscope raise will certainly be a challenge. Not sure how that is going to occur yet!